GPS - SW OziExplorer
NaÜel jsem v Internetu software, kter² se mi docela lφbil. Je a₧ z dalekΘ Austrßlie a myslφm si, ₧e co se t²Φe spoluprßce s GPS, je na vysokΘ ·rovni. Navφc je zde p°edpoklad dalÜφho v²voje, proto₧e i tato verze, kterou jsem si nedßvno stßhnul, je 3.51 beta. Ta beta je dost znßt, proto₧e se mi progrßmek dost Φasto zasekßval, ale zßkladnφ splnil a to tΘm∞° na v²bornou. Navφc je voln∞ Üφ°iteln² a i jeho registraΦnφ poplatek 50USD nenφ nikterak p°emrÜt∞n². Za tyto penφze ovÜem dostßvßte poslednφ pln∞ funkΦnφ verzi, zde p°edpoklßdßm verzi 3.0. P°istupme ale k popisu programu.
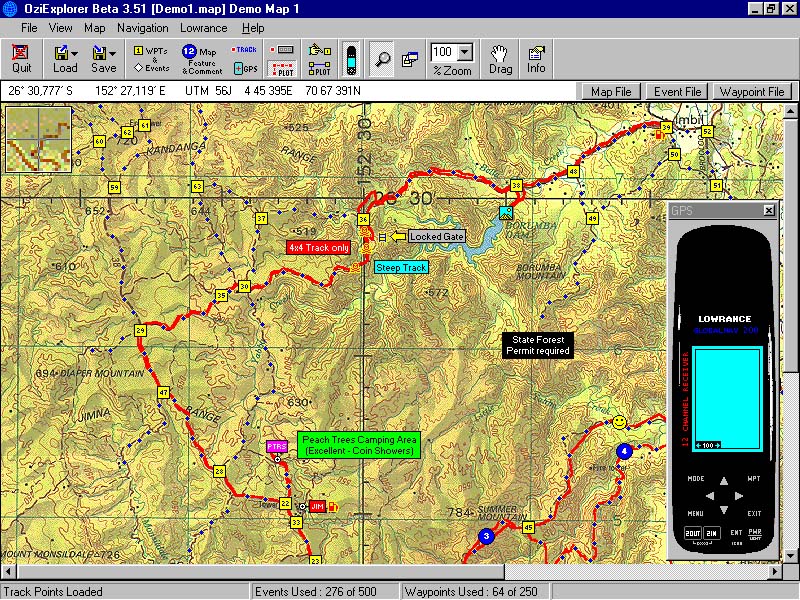
 Po odstartovßnφ se nßm zobrazφ logo v²robce a nßsleduje vlastnφ program. Obrazovka je prßzdnß a je na vßs, co se rozhodnete d∞lat, jestli spolupracovat s GPS nebo naΦφst a kalibrovat mapu. Pro ukßzku jsem pou₧il dodanΘ demo, i kdy₧ mßm u₧ zkuÜenosti i vlastnφ, ale pouze s p°edeÜlou verzφ programu. Kliknutφm na obrßzek nebo tento odkaz dostanete celou obrazovku o velikosti 800x600 bod∙ (222kB).
Po odstartovßnφ se nßm zobrazφ logo v²robce a nßsleduje vlastnφ program. Obrazovka je prßzdnß a je na vßs, co se rozhodnete d∞lat, jestli spolupracovat s GPS nebo naΦφst a kalibrovat mapu. Pro ukßzku jsem pou₧il dodanΘ demo, i kdy₧ mßm u₧ zkuÜenosti i vlastnφ, ale pouze s p°edeÜlou verzφ programu. Kliknutφm na obrßzek nebo tento odkaz dostanete celou obrazovku o velikosti 800x600 bod∙ (222kB).

Program se ovlßdß pomocφ Menu na levΘm hornφm okraji obrazovky. Odleva se jedß o ukonΦenφ programu, dßle menu pro nahrßvßnφ a uklßdßnφ vytvo°en²ch map, waypoint∙ a udßlostφ, menu pro uklßdßnφ tΘho₧, tlaΦφtko,  aktivujφcφ vytvß°enφ waypoint∙ a event∙ na map∞, tlaΦφtko, aktivujφcφ vytvß°enφ pozic a komentß°∙, dßle dv∞ tlaΦφtka jednak pro aktivaci manußlnφho vytvß°enφ trackpoint∙, jednak pro centrovßnφ GPS na zvolenou pozici, dv∞ tlaΦφtka pro kontrolu trackpoint∙ a pro vykreslenφ trasy, dv∞ tlaΦφtka pro sprßvu navr₧enΘ cesty, aktivace okna s nasimulovanou GPS, tlaΦφtko pro zobrazenφ zoom okna v levΘm rohu obrazovky naho°e (mal² obrßzek), tlaΦφtko pro aktivaci navigßtoru map, nastavenφ velikosti mapy, posun na map∞ a v²pis informacφ o konfiguraci programu. A te∩ co s tφm.
aktivujφcφ vytvß°enφ waypoint∙ a event∙ na map∞, tlaΦφtko, aktivujφcφ vytvß°enφ pozic a komentß°∙, dßle dv∞ tlaΦφtka jednak pro aktivaci manußlnφho vytvß°enφ trackpoint∙, jednak pro centrovßnφ GPS na zvolenou pozici, dv∞ tlaΦφtka pro kontrolu trackpoint∙ a pro vykreslenφ trasy, dv∞ tlaΦφtka pro sprßvu navr₧enΘ cesty, aktivace okna s nasimulovanou GPS, tlaΦφtko pro zobrazenφ zoom okna v levΘm rohu obrazovky naho°e (mal² obrßzek), tlaΦφtko pro aktivaci navigßtoru map, nastavenφ velikosti mapy, posun na map∞ a v²pis informacφ o konfiguraci programu. A te∩ co s tφm.
 D°φve, ne₧ zaΦnete s programem pracovat, zajd∞te n∞kam do prodejny poΦφtaΦ∙ a nechte si oskenovat mapu s okolφm vaÜeho bydliÜt∞. Je t°eba formßt BMP nebo TIF. Mapa by m∞la b²t se sou°adn²m systΘmem WGS 84, proto₧e budete pot°ebovat alespo≥ dva body s p°esn∞ urΦen²mi sou°adnicemi v LAT/LON. Registrovanß verze je p°esn∞jÜφ a dovolφ vßm zadat Φty°i body a odstranit tφm p°φpadnΘ nep°esnosti p°i skenovßnφ. Pak z nabφdky File zvolφte Load and Calibrate Bitmap, nahrajete vaÜφ naskenovanou mapu a zadßte dva (Φty°i) kalibraΦnφ body. StaΦφ zadat jedny ze dvou mo₧n²ch sou°adnic, zbytek se dopoΦφtß. Tφm mßte zkalibrovanou mapu a m∙₧ete si zaΦφt plßnovat cestu. Aktivujete zadßvßnφ waypoint∙ a zaΦnete je sßzet do mapy. Pak aktivujete route editor a naplßnujete si cestu. Aktivujete zobrazenφ cesty a zkontrolujete, odpovφdß-li vaÜim p°edstavßm. Pak pomocφ konfigurace v polo₧ce file nastavφte vaÜφ GPS, podotkn∞me jeÜt∞, ₧e program umφ pracovat s kanßlem NMEA a v rozÜφ°enΘm m≤du s Lovrance Globalnav 200 a 212, Eagle Explorer I a II, Garmin II+, 12, 12XL, 45 a dalÜφmi. Pak u₧ zb²vß nakonfigurovat na GPS komunikaΦnφ kanßl a pomocφ menu s nßzvem vaÜφ GPS
D°φve, ne₧ zaΦnete s programem pracovat, zajd∞te n∞kam do prodejny poΦφtaΦ∙ a nechte si oskenovat mapu s okolφm vaÜeho bydliÜt∞. Je t°eba formßt BMP nebo TIF. Mapa by m∞la b²t se sou°adn²m systΘmem WGS 84, proto₧e budete pot°ebovat alespo≥ dva body s p°esn∞ urΦen²mi sou°adnicemi v LAT/LON. Registrovanß verze je p°esn∞jÜφ a dovolφ vßm zadat Φty°i body a odstranit tφm p°φpadnΘ nep°esnosti p°i skenovßnφ. Pak z nabφdky File zvolφte Load and Calibrate Bitmap, nahrajete vaÜφ naskenovanou mapu a zadßte dva (Φty°i) kalibraΦnφ body. StaΦφ zadat jedny ze dvou mo₧n²ch sou°adnic, zbytek se dopoΦφtß. Tφm mßte zkalibrovanou mapu a m∙₧ete si zaΦφt plßnovat cestu. Aktivujete zadßvßnφ waypoint∙ a zaΦnete je sßzet do mapy. Pak aktivujete route editor a naplßnujete si cestu. Aktivujete zobrazenφ cesty a zkontrolujete, odpovφdß-li vaÜim p°edstavßm. Pak pomocφ konfigurace v polo₧ce file nastavφte vaÜφ GPS, podotkn∞me jeÜt∞, ₧e program umφ pracovat s kanßlem NMEA a v rozÜφ°enΘm m≤du s Lovrance Globalnav 200 a 212, Eagle Explorer I a II, Garmin II+, 12, 12XL, 45 a dalÜφmi. Pak u₧ zb²vß nakonfigurovat na GPS komunikaΦnφ kanßl a pomocφ menu s nßzvem vaÜφ GPS 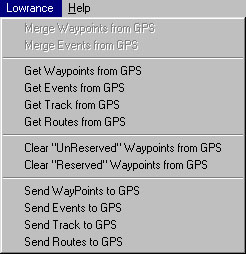 m∙₧ete poslat navr₧enß data do GPS. Pak vypnete poΦφtaΦ, aktivujete cestu v GPS a m∙₧ete vyrazit. Pro p°φstroje Garmin je nabφdka rozÜφ°ena jeÜt∞ o ovlßdßnφ osv∞tlenφ displeje a vypnutφ GPS.
m∙₧ete poslat navr₧enß data do GPS. Pak vypnete poΦφtaΦ, aktivujete cestu v GPS a m∙₧ete vyrazit. Pro p°φstroje Garmin je nabφdka rozÜφ°ena jeÜt∞ o ovlßdßnφ osv∞tlenφ displeje a vypnutφ GPS. 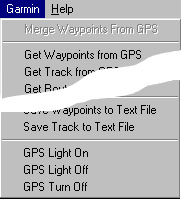
Kdy₧ se vrßtφte, stßhnete si z GPS TrackPointy, doplnφte Eventy a m∙₧ete si vÜe i s mapou ulo₧it do soubor∙. Ty si dßte do archivu a m∙₧ete je pou₧φt v budoucnu nebo celou sadu zabalφte n∞jak²m pakovaΦem (PkZip nebo WinZip) a poÜlete mi to (Soubor nesmφ b²t v∞tÜφ ne₧ 1MB!). Jß vßÜ v²let vystavφm na serveru a kdo pojede s GPS do vaÜeho kraje, m∙₧e projφt nebo projet stejnou trasu jako vy a obdivovat se stejn²m krßsßm.
Kdo vlastnφte program Geobßze, m∙₧ete pou₧φt i v²stupu z n∞j jako mapovΘho podkladu, nebo¥ umφ exportovat aktußlnφ mapu do formßtu BMP.
Dojmy
Po pr∙niku do ze zaΦßtku pon∞kud nesrozumitelnΘho ovlßdßnφ na m∞ program ud∞lal docela dobr² dojem a myslφm si, ₧e pro b∞₧nΘ plßnovßnφ v²let∙ s GPS ·pln∞ postaΦuje. Lφbila se mi filozofie p°φstupu k prßci s mapou.
Zhodnocenφ
Program umφ spolupracovat se vÜemi GPS p°φstroji, kterΘ podporujφ komunikaci NMEA. U °ady dalÜφch umφ pracovat s vnit°nφ pam∞tφ p°φstroje a zpracovßvat data v nφ ulo₧enß a pro n∞kolik p°φstroj∙, uveden²ch v²Üe, je navr₧en a umφ je ovlßdat komplet. Vzhledem k tomu, ₧e se jednß o nejprodßvan∞jÜφ p°φstroje GPS na sv∞tov²ch trzφch, vyhovφ program v∞tÜin∞ u₧ivatel∙. V²hodou je mapovß nezßvislost, staΦφ mφt k dispozici papφrovou mapu se sou°adn²m systΘmem WGS 84 a scanner, nev²hodou je, ₧e ₧ßdnΘ p°edzpracovanΘ mapy nejsou k dispozici, nepoΦφtßm-li demo. Je ovÜem t∞₧kΘ, p°edstavit si velikost programovΘho balφku s p°edzpracovan²mi mapami, proto je tato p°ipomφnka pouze °eΦnickß.
V²robce 
Pavel Rudolf
 Po odstartovßnφ se nßm zobrazφ logo v²robce a nßsleduje vlastnφ program. Obrazovka je prßzdnß a je na vßs, co se rozhodnete d∞lat, jestli spolupracovat s GPS nebo naΦφst a kalibrovat mapu. Pro ukßzku jsem pou₧il dodanΘ demo, i kdy₧ mßm u₧ zkuÜenosti i vlastnφ, ale pouze s p°edeÜlou verzφ programu. Kliknutφm na obrßzek nebo tento odkaz dostanete celou obrazovku o velikosti 800x600 bod∙ (222kB).
Po odstartovßnφ se nßm zobrazφ logo v²robce a nßsleduje vlastnφ program. Obrazovka je prßzdnß a je na vßs, co se rozhodnete d∞lat, jestli spolupracovat s GPS nebo naΦφst a kalibrovat mapu. Pro ukßzku jsem pou₧il dodanΘ demo, i kdy₧ mßm u₧ zkuÜenosti i vlastnφ, ale pouze s p°edeÜlou verzφ programu. Kliknutφm na obrßzek nebo tento odkaz dostanete celou obrazovku o velikosti 800x600 bod∙ (222kB).